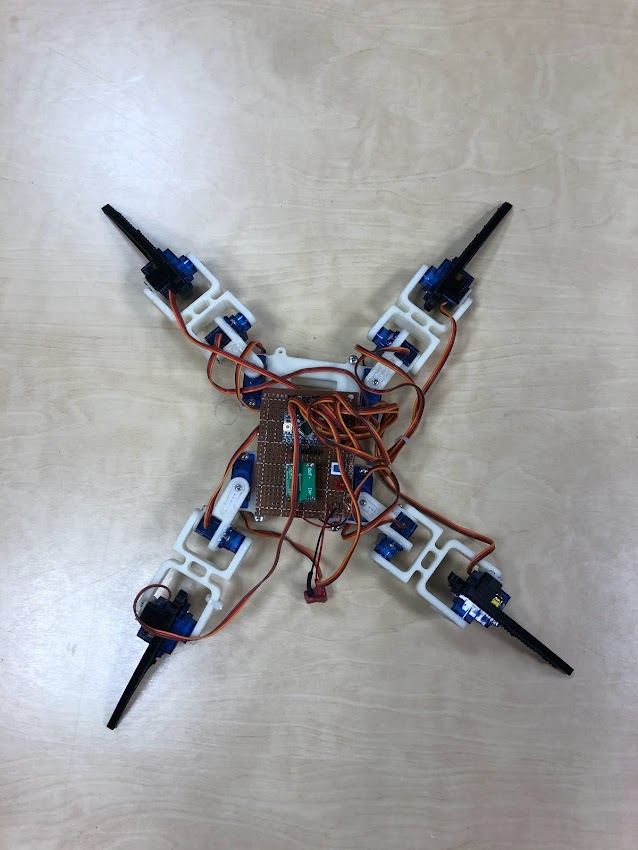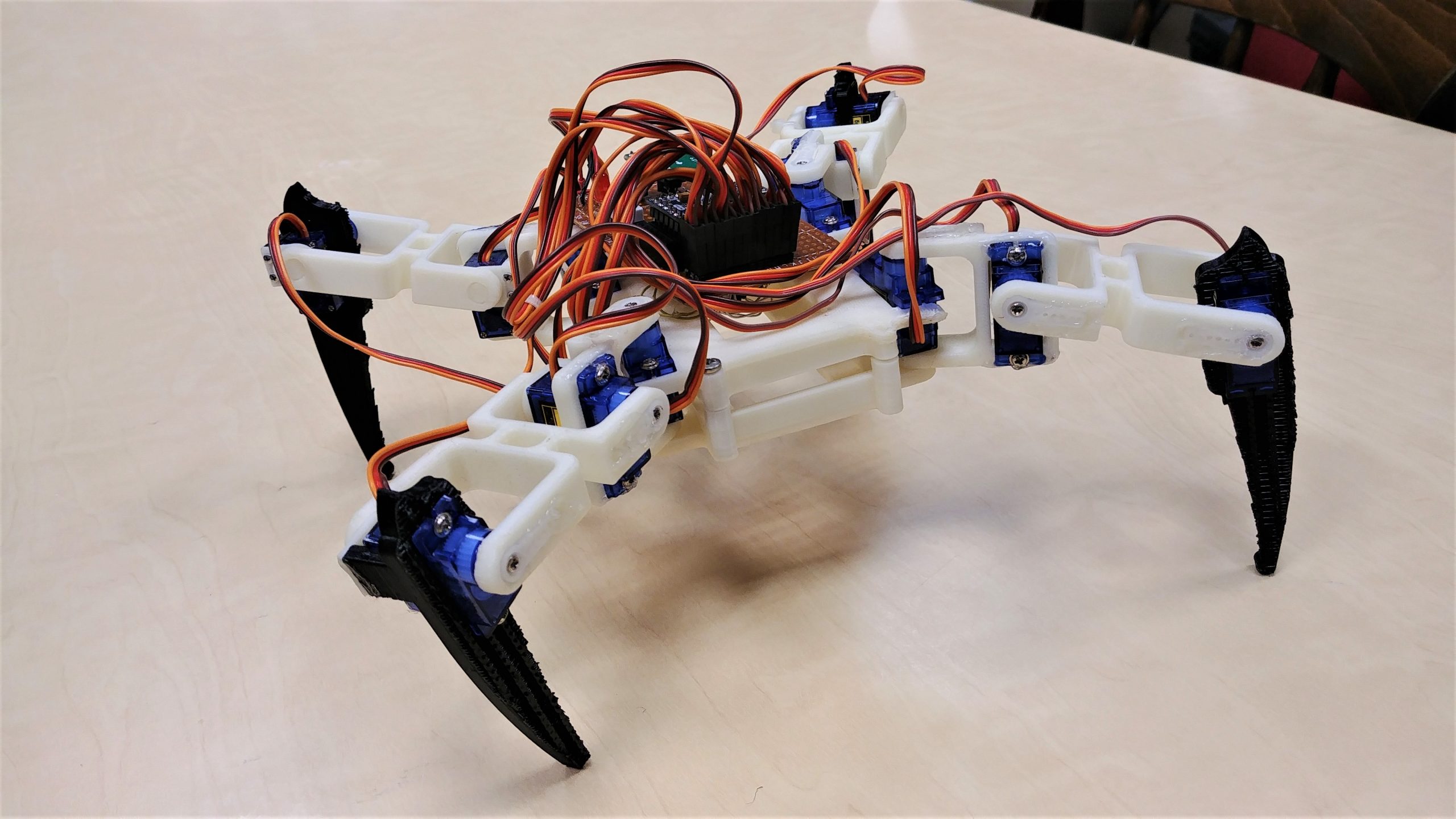
Robot mobilny, który porusza się w zróżnicowanym terenie oraz pokonuje przeszkody, takie jak np. schody. W ramach projektu została opracowana konstrukcja mechaniczna, elektroniczna, algorytmy sterowania oraz metody komunikacji z robotem. Kolejnym krokiem było wdrożenie prostego trybu autonomicznego, który umożliwił robotowi samodzielne poruszanie się.